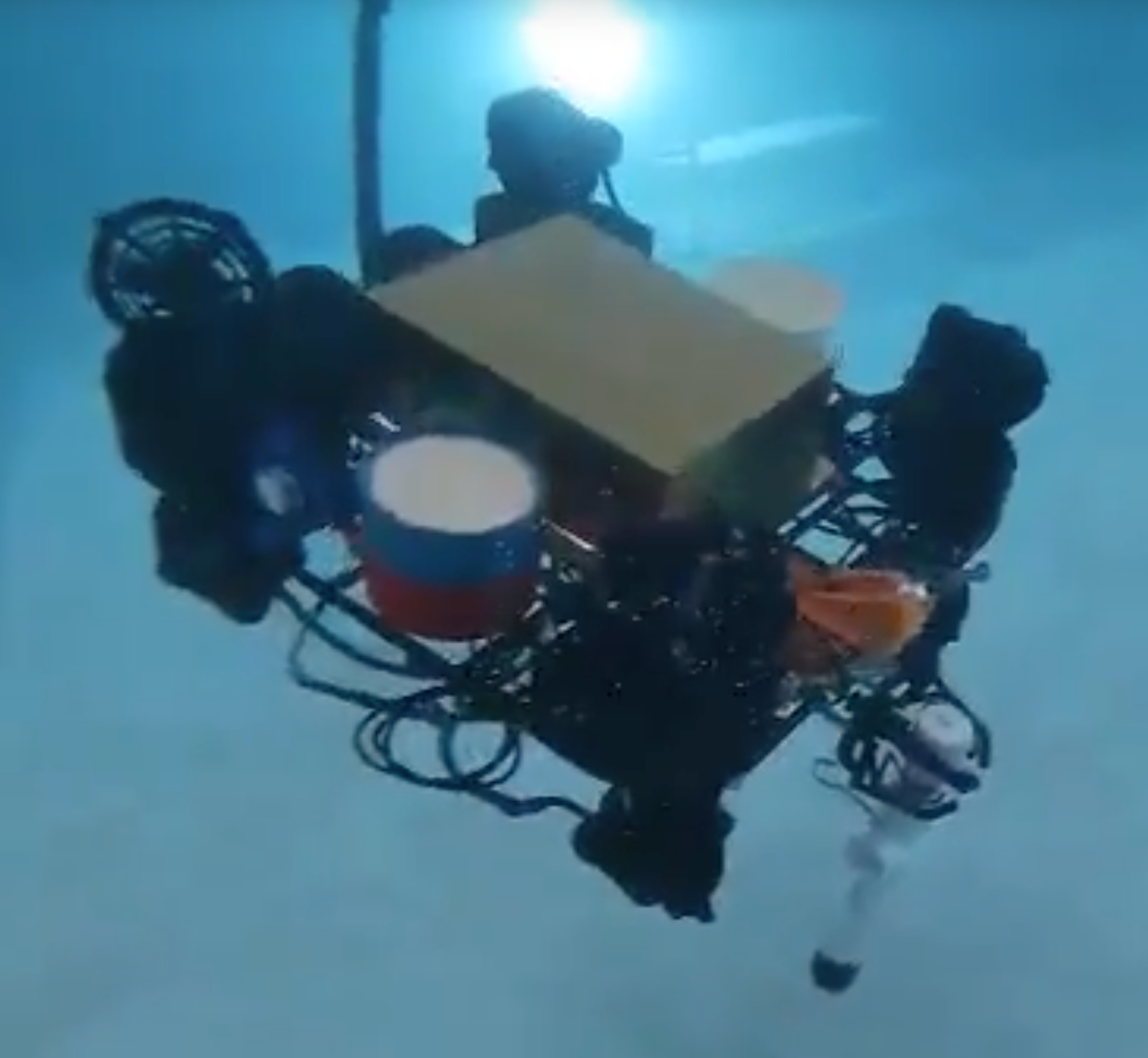
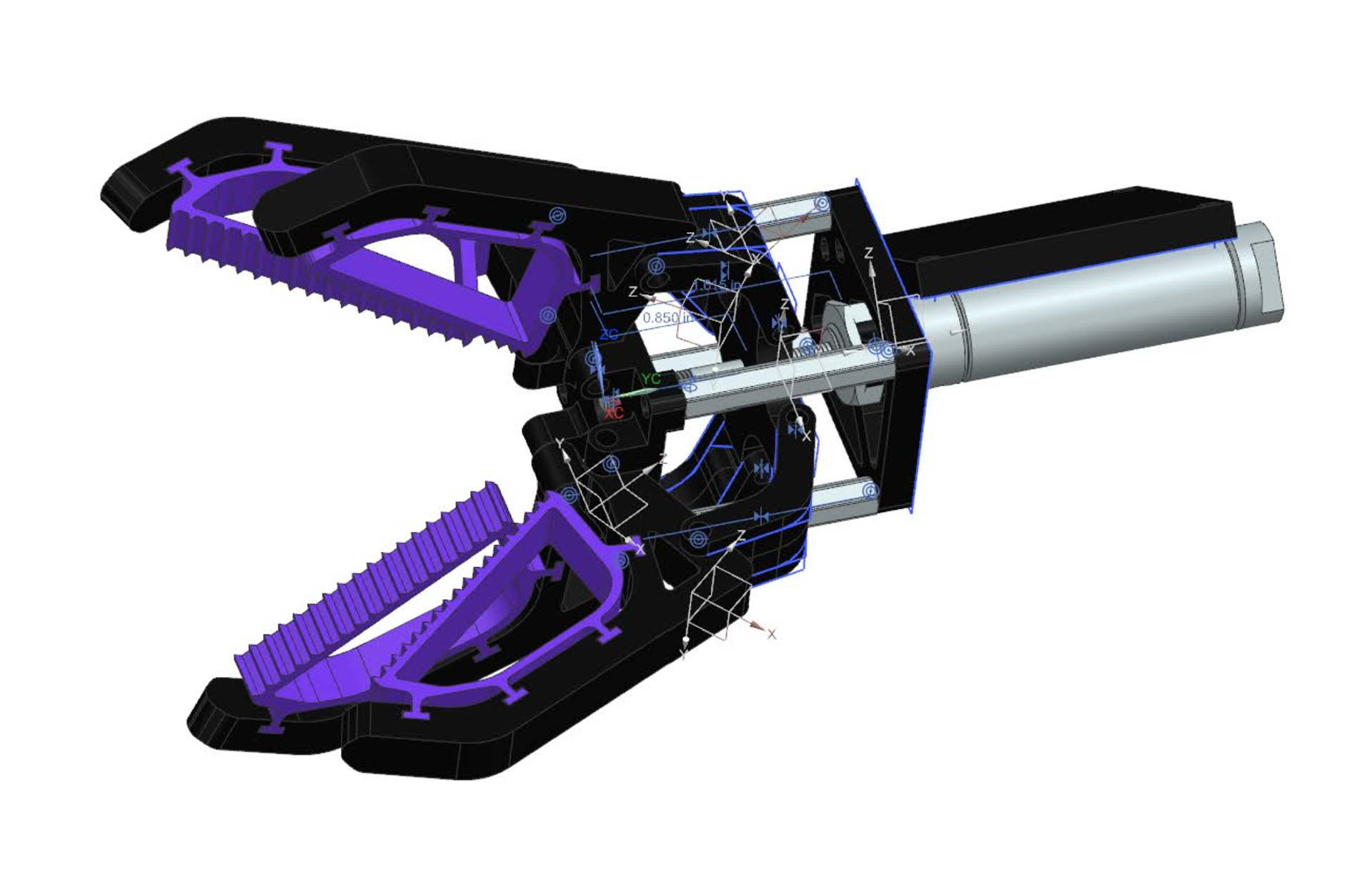
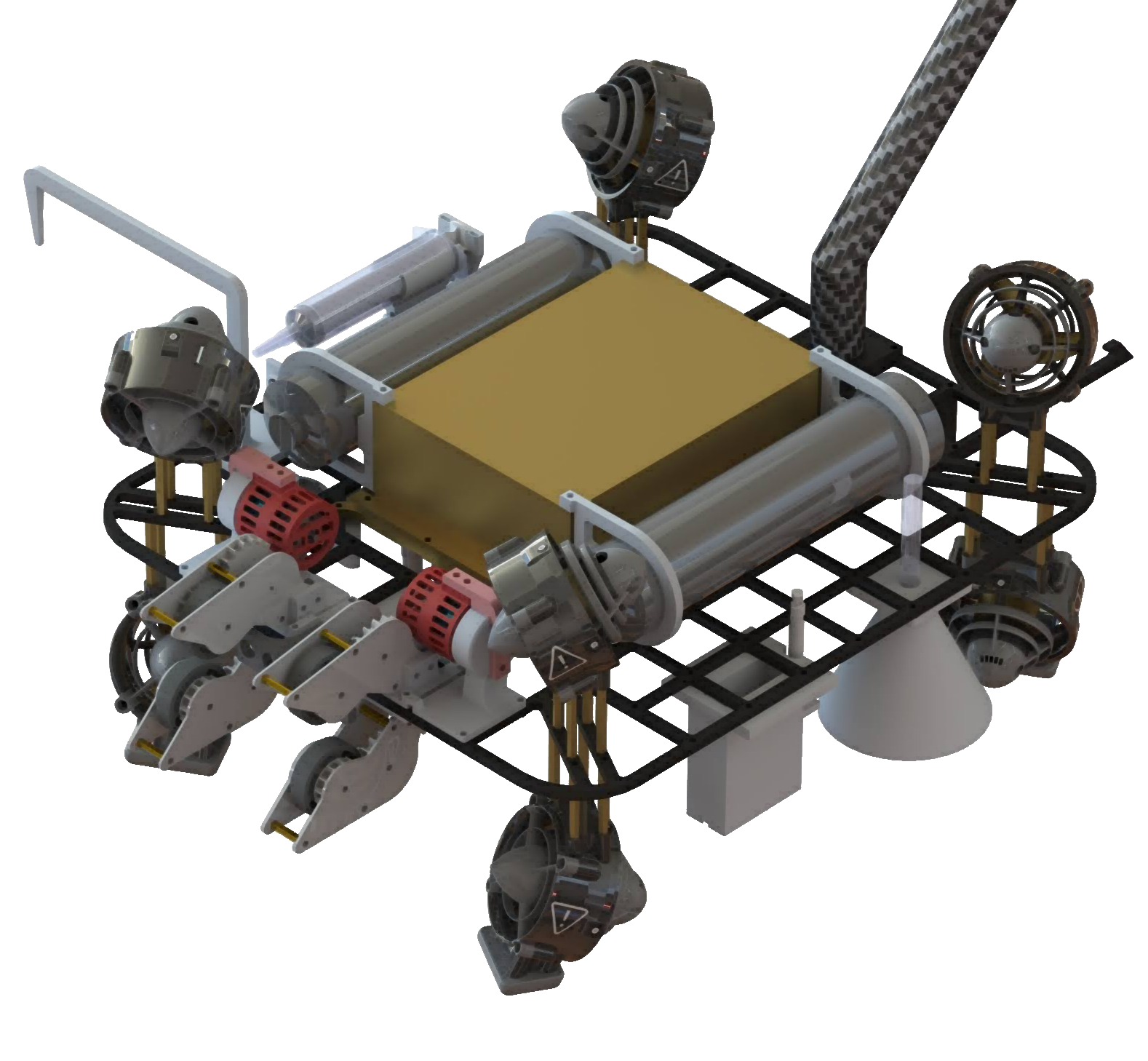
I competed on the Purdue IEEE ROV team from 2022-2024 as the tools lead and member of the mechanical team. My first year, I designed the frame and the unique roller intake mechanism for the team. The next year, I was nominated to be the tools lead due to my contributions to manipulator design. I taught younger team members how to design various tools and gave constructive feedback on how to improve their designs. Additionally, I designed a primary manipulator that could grab a large variety of objects with different shapes and sizes by utilizing a unique, flexible TPU gripper mechanism.