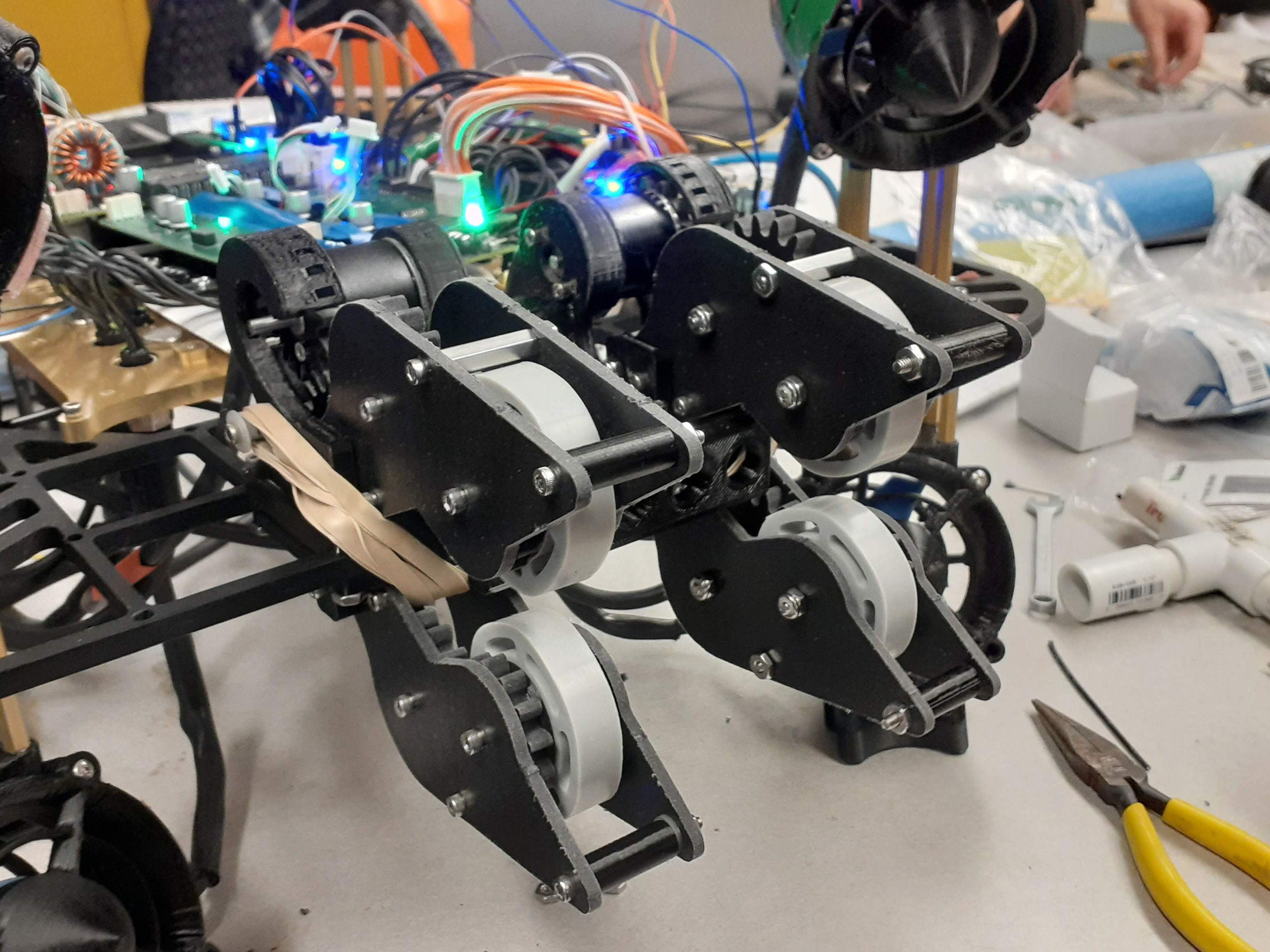
This origami climber robot has been a long-term research project that is going to be a large portion of my thesis. The goal of this project was to design and build a robot that could traverse complex 3D truss environments while utilizing origami patterns and properties in the functional components of the robot. The body is a Bellows Fold pattern constructed from 3D printed TPU. The claw is an interpretation of the Miura-Ori pattern, constructed with a unique combination of 3D printed TPU and PCTPE due to the binding properties of the two materials. My duties on this project were to design the mechanical and electrical systems on the robot, as well as program a PID control algorithm and autonomous sequences to show the robots capabilities. My research lab will continue this project once I graduate, with the goal of increasing the speed of the robot's movement, as well as adding path planning and a more open-loop autonomous structure.